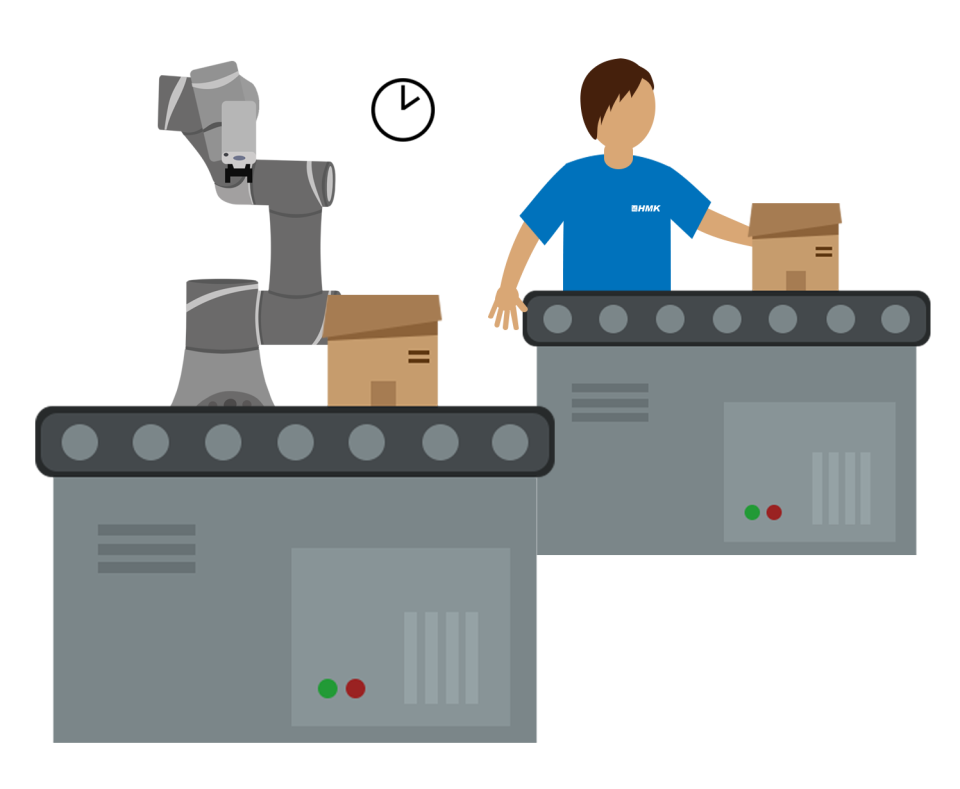
Co-Existence
If the robot can operate autonomously, without the need for direct interaction with people, or simply operating in the same room it is known as Co-existence.
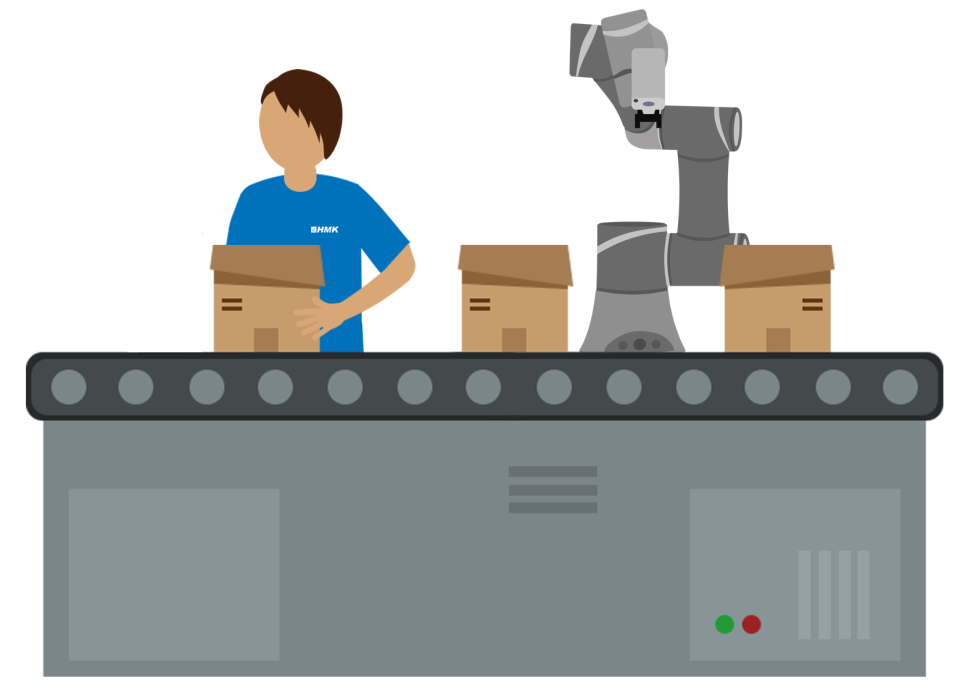
Co-operation
When an operator's tasks take them into the operating zone of a Cobot, but no direct interaction it is called Co-operation.
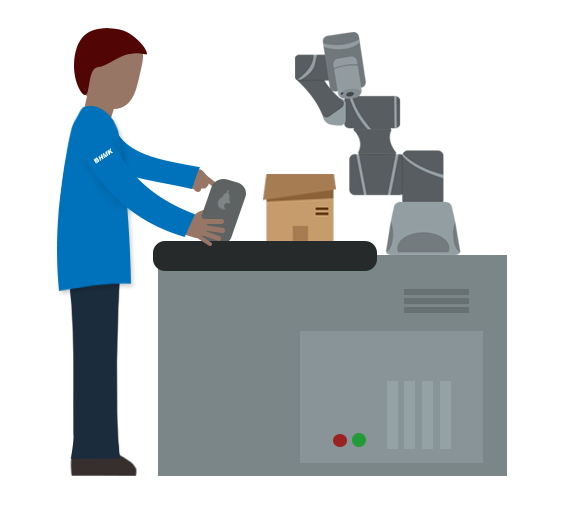
Collaboration
Human interaction with a Cobot develops a Collaborative application. Where the robot does not replace the human, rather enhances their proficiency. With these definitions, it should be a straightforward task to assign Cobot applications their mode.
OUR PARTNERS
Authorised Distribution Partner For




